This week we need to finish building our arm and begin learning how to control the it. After we accomplish that, we have to be able to autonomously program the robot to put the tetrahedron onto the hooks. We began to build the arm Friday, but decided that the design was inefficient and we started over today.
 |
| Our old design we took apart. |
 |
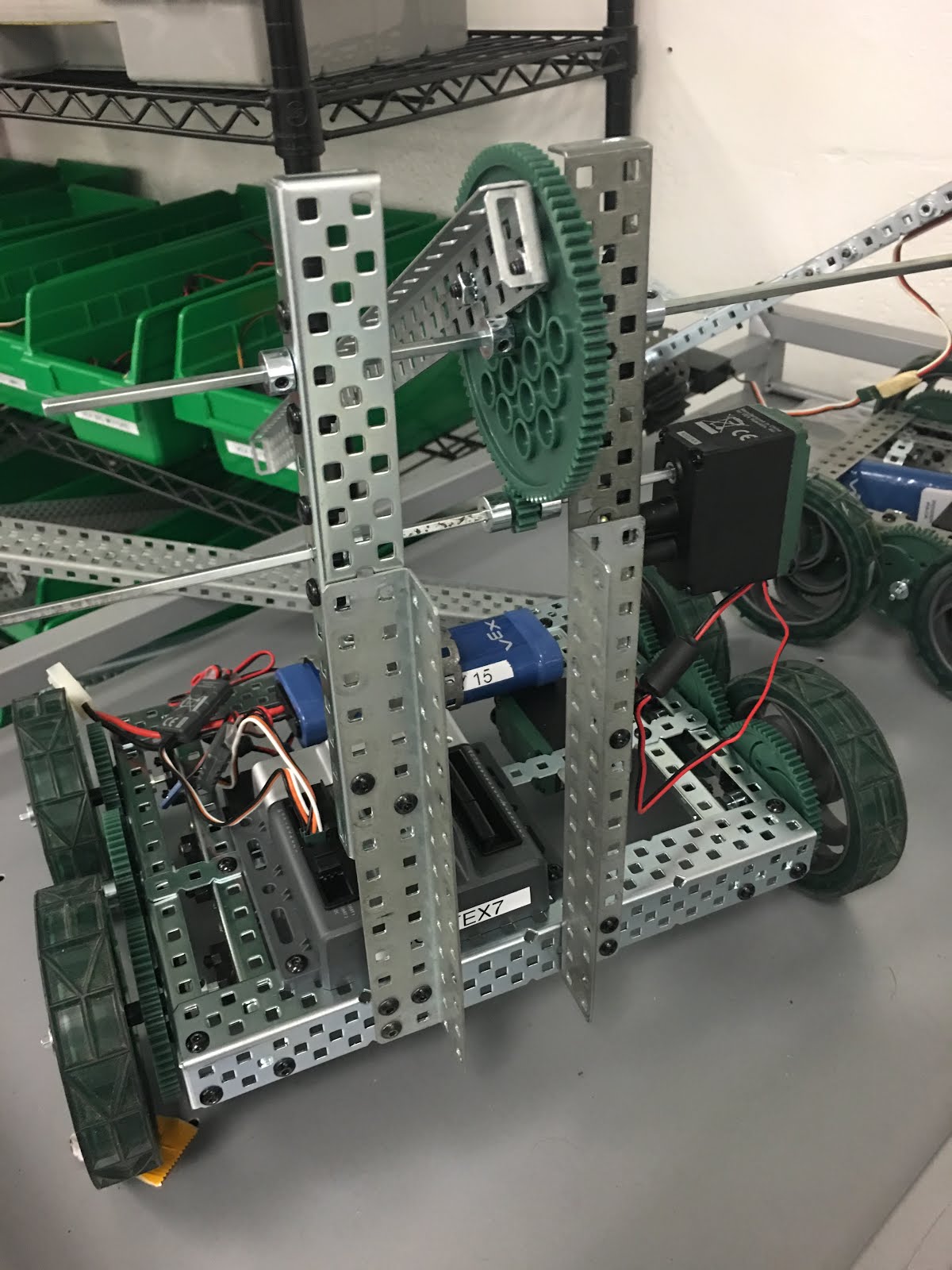
| Our new design we intend to use(robot not ours). |

No comments:
Post a Comment