







 We added another L bracket on the elbow of our arm for stability. We also fixed the problem with our gears hitting the floor by tightening all our the bolts and screws. We also re-made our hook so it reached higher and longer. We spent the rest of the week practicing.
We added another L bracket on the elbow of our arm for stability. We also fixed the problem with our gears hitting the floor by tightening all our the bolts and screws. We also re-made our hook so it reached higher and longer. We spent the rest of the week practicing.
 |
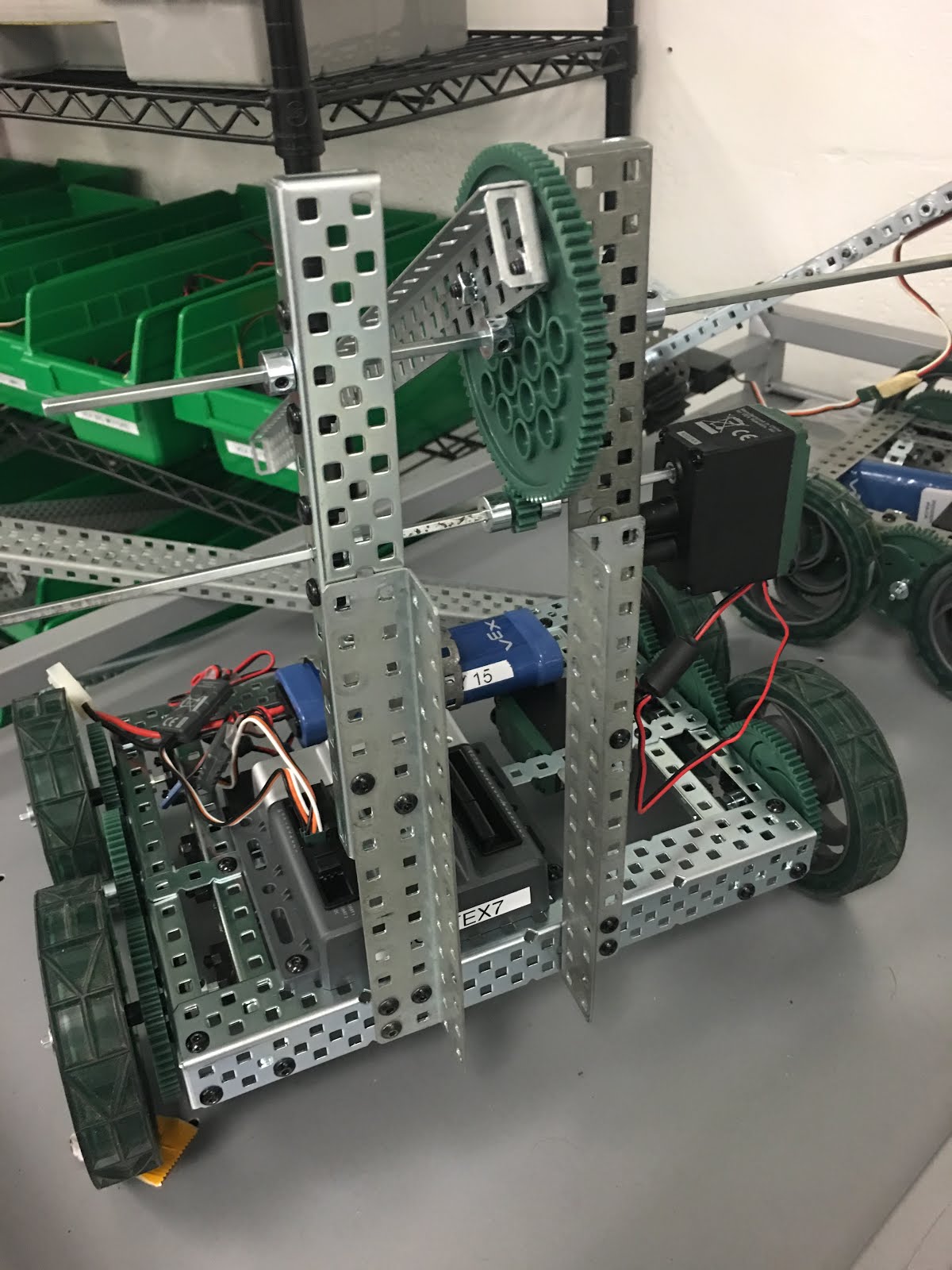
| Our old design we took apart. |
 |
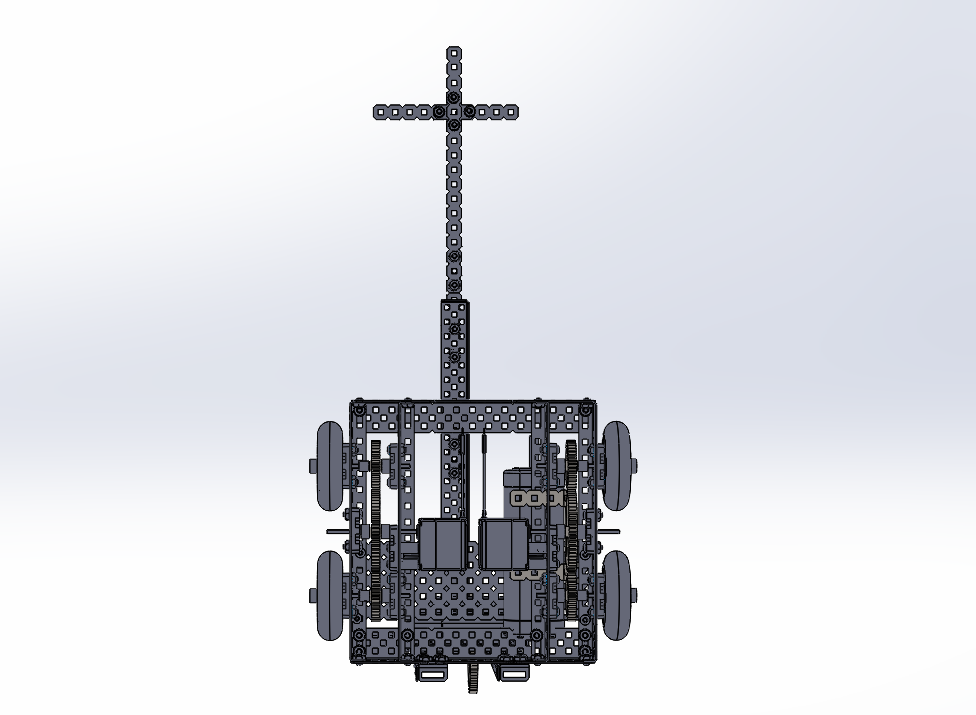
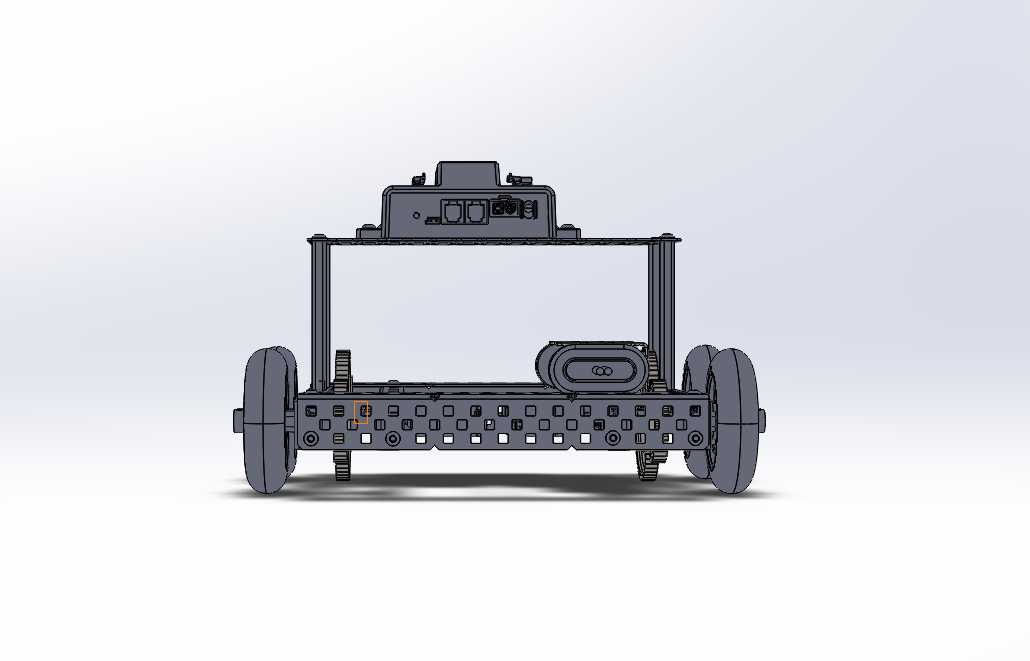
| Our new design we intend to use(robot not ours). |
 |
| Building our arm. |
 |
| Finding out what was wrong with the left motor. |
 |
| Making our laps. |











{kind=link}